

Published date: 15th of March, 2026

Autonomous robots are becoming more capable every year. They can navigate complex environments, manipulate objects, assist workers, and execute increasingly sophisticated tasks across industries such as manufacturing, logistics, mining, and healthcare.
Yet as robotics advances, one important question remains underexplored:
How do we know a robot executed a mission well, rather than merely completed it?
In most deployments today, robotic performance is still judged primarily by task success. If the robot reaches the destination, completes a route, or performs the assigned task, the mission is typically considered successful.
But in real-world autonomy, mission success and mission integrity are not the same thing.
A robot may complete a task while subtle deviations emerge during execution. These deviations may appear in the robot’s internal signals, including actuator behaviour, control timing, or communication patterns. They may not immediately cause mission failure, but they can indicate early signs of instability, performance degradation, or hidden operational risk.
As autonomous systems scale across fleets and increasingly critical environments, simply measuring whether a task succeeded will no longer be enough.
We believe the industry must begin moving beyond binary success metrics toward a deeper understanding of execution integrity.
Today’s monitoring systems typically answer a simple question:
Did the robot complete the task?
But this leaves a critical gap between task completion and how the task was executed.
During a mission, robots generate rich streams of internal signals that reflect their operational behaviour. Subtle changes in these signals may indicate emerging issues long before a system failure occurs.
Examples include:
1. Actuator oscillations.
2. Signal noise amplification.
3. Control timing instability.
4. Communication irregularities.
5. Increased mechanical strain.
These patterns often remain invisible to traditional monitoring approaches.This creates what we call the Integrity Gap — the difference between mission success and execution integrity.
.jpeg)
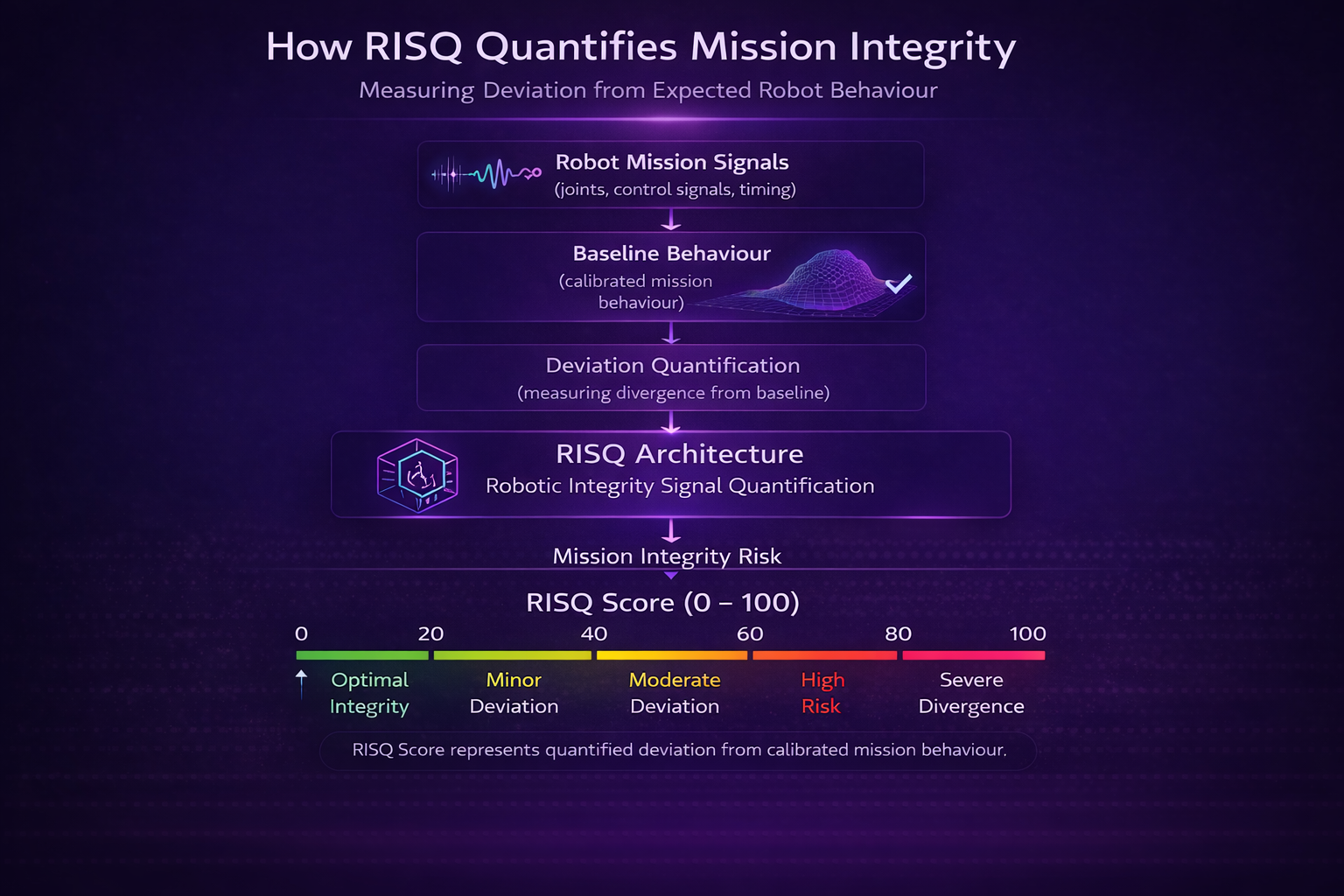
At RideScan, we developed RISQ (Robotic Integrity Signal Quantification) to help address this challenge.
RISQ is a mechanism designed to quantify deviations in robotic execution signals relative to calibrated baseline behaviour.
Instead of focusing only on whether a mission succeeded, RISQ evaluates how closely the robot’s execution signals align with expected patterns learned during calibration.
When a robot operates normally, the resulting score remains low.
When deviations begin to appear, the score increases, indicating divergence from baseline execution behavior.
This transforms robot monitoring from a binary outcome into a quantitative measure of mission integrity.
Imagine a robot performing a routine autonomous mission. Traditional monitoring systems might simply report: Mission Status: Successful
But beneath the surface, subtle deviations could be emerging in the robot’s execution signals.
RISQ analyses mission-level signal behaviour and produces a structured integrity risk score that reflects how closely the execution aligns with the calibrated baseline behaviour.
This allows engineers and operators to identify potential issues before they evolve into visible system failures.
As robots move into more complex and safety-critical environments, the need for reliable integrity assessment becomes increasingly important.
Quantifying execution integrity can enable:
A. Earlier detection of system degradation.
B. More reliable fleet operations.
C. Improved safety monitoring.
D. Deeper insight into robotic behaviour.
RISQ is designed to enable these capabilities.
At RideScan, we believe the future of autonomy will not be defined only by what robots can do, but by how reliably, consistently, and transparently they do it.
As robotics deployments expand, trust in autonomous systems must be supported by stronger mechanisms for understanding system behaviour.
RISQ represents our approach to quantifying execution integrity and helping organisations better understand how their robots perform in real-world missions.
Mission success is not the same as mission integrity.
See RISQ mechanism in action.

